
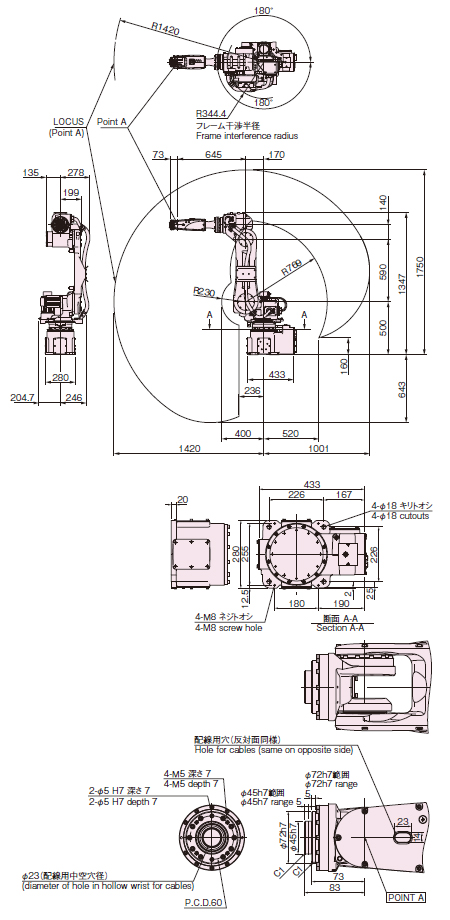
Max Payload : 10 KG
Max Reach : 1420 mm
1. Flexibility to support a variety of processes
- Wide operating envelope, plus high water and dust proof performance (wrists and body). Compatible with variety of customer work environments.
2. Streamlined wiring passes through hollow wrist
- Reduced risk of wiring interfering with surrounding equipment to increase applicability and make easy access to narrow space.
3. Compact body and powerful arm
- Smallest in its class with a mere 280 mm installation width.
| Robot model | MC10S-01 | |
|---|---|---|
| Structure | Articulated construction | |
| Number of axes | 6 | |
| Drive system | AC servo system | |
| Max. operating envelope | J1 | ±3.14rad (±180°) |
| J2 | +1.05 |
|
| J3 | +4.22 |
|
| J4 | ±3.32rad (±190°) | |
| J5 | ±2.09rad(±120°) | |
| J6 | ±6.28rad (±360°) | |
| Max. velocity | J1 | 3.49rad/s (200°/s) |
| J2 | 2.96rad/s (170°/s) | |
| J3 | 2.96rad/s (170°/s) | |
| J4 | 6.98rad/s (400°/s) | |
| J5 | 6.98rad/s (400°/s) | |
| J6 | 13.96rad/s (800°/s) | |
| Payload | Wrist *1 | 10kg |
| Allowable static load torque for wrist | J4 | 22N·m |
| J5 | 22N·m | |
| J6 | 11N·m | |
| Allowable moment of inertia for wrist *2 | J4 | 0.7kg·m2 |
| J5 | 0.7kg·m2 | |
| J6 | 0.2kg·m2 | |
| Max. reach | 1420mm | |
| Position repeatability *3 | ±0.06mm | |
| Air piping | Ø6 × 2 | |
| Application wirings | 10 circuits | |
| Installation | Floor mounted, Ceiling mounted | |
| Ambient conditions |
Ambient temperature:0 |
|
| Environmental performance *5 | Wrist has IP67 and main body has IP65 equivalent | |
| Robot mass | 198kg | |
(*1) This value varies from the installed position and the wrist load mass.
(*2) Note that wrist moment of inertia varies depending on wrist load conditions.
(*3) JIS B 8432 compliant.
(*4) When used at less than 1,000 m above sea level. Exceeding the allowable altitude limits the acceptable ambient temperature.
(*5) Fluids that corrode the seal material, such as organic solvents, acids, alkalis, salts and petroleum-based cutting fluids, cannot be used
(*1) The specifications are subject to changes without notice.
(*2) In case that an end user uses this product for military purpose or production of weapon, this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Act. Please go through careful investigation and necessary formalities for export.

Max Payload : 10 – 20 KG
Max Reach :
1. Suitable for various purpose.
- Wide envelope and environment protection makes MC20 valuable robot for various kind of manufacturing processes.
2. Compact design
- Easy installation by compact design, and powerful wrist supports to transfer large or heavy works.
3. Controller
- FD11
| Robot model | MC20-01 | MC10L-01 | |
|---|---|---|---|
| Construction | Articulated construction | ||
| Number of axes | 6 | ||
| Drive system | AC servo system | ||
| Max. operating area | J1 | +/-3.14rad (+/-180°) | |
| J2 | +1.05 to -2.53rad (+60 to -145°) | ||
| J3 | +4.22 to -2.84rad (+242 to -163°) | ||
| J4 | +/-3.14rad (+/-180°) | ||
| J5 | +/-2.42rad (+/-139°) | ||
| J6 | +/-6.28rad (+/-360°) | ||
| Max. speed | J1 | 2.96rad/s (170°/s) | 2.62rad/s (150°/s) |
| J2 | 2.96rad/s (170°/s) | ||
| J3 | 2.96rad/s (170°/s) | ||
| J4 | 6.28rad/s (360°/s) | ||
| J5 | 6.28rad/s (360°/s) | ||
| J6 | 10.5rad/s (600°/s) | ||
| Payload*1 | 20kg (Max. 22kg) | 10kg | |
| Wrist torque | J4 | 49N·m | 24.5N·m |
| J5 | 49N·m | 24.5N·m | |
| J6 | 23.5N·m | 12N·m | |
| Wrist moment of inertia*2 | J4 | 1.6kg·m2 | |
| J5 | 1.6kg·m2 | ||
| J6 | 0.8kg·m2 | 0.7kg·m2 | |
| Position repeat accuracy*3 | +/-0.06mm | ||
| Maximum working air pressure | 0.49MPa (5.0kgf/cm2)or less | ||
| Ambient temperature | 0 to 45°C | ||
| Installation parameters | Floor mounted,Ceiling mounted | ||
| Environmental resistance*4 | Meets the IP65 standard (for dust and waterproofing) | ||
| Robot mass | 220kg | 225kg | |
(*1) This value varies from the installed position and the wrist load mass.
(*2) Note that wrist moment of inertia varies depending on wrist load conditions.
(*3) JIS B 8432 compliant.
(*4) Fluids that corrode the seal material, such as organic solvents, acids, alkalis, salts, and petroleum-based cutting fluids, cannot be used.
(*1) The specifications are subject to changes without notice.
(*2) In case that an end user uses this product for military purpose or production of weapon, this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Law. Please go through careful investigation and necessary formalities for export.

Max Payload : 35 – 70 KG
Max Reach :
1. Adaptable to various production environments
- The new MC (35/50/70kg) has a std.IP54 rating for the body,(optional IP65/IP67) and std.IP67 for the arm/wrist.
- Available IP ratings make the MC Series ideal for various applications that include harsh environments that previously required expensive robot covers.
2. Large working envelope and powerful robot arm
- Maximum reach of 2,050mm, (best in class).
- Strong wrist torque can handle a large variety of applications.
3. Controller
- FD11
| Robot model | MC35-01 | MC50-01 | MC70-01 | |
|---|---|---|---|---|
| Construction | Articulated construction | |||
| Number of axes | 6 | |||
| Drive system | AC servo system | |||
| Max. operating area | J1 | +/-2.88rad (+/-165°) | ||
| J2 | +1.39 to -2.35rad (+80 to -135°) | |||
| J3 | +4.54 to -2.55rad (+260 to -146°) | |||
| J4 | +/-6.28rad (+/-360°) | |||
| J5 | +/-2.18rad (+/-125°) | |||
| J6 | +/-7.84rad (+/-450°) | |||
| Max. speed | J1 | 3.23rad/s (185°/s) | 3.14rad/s (180°/s) | 3.05rad/s (175°/s) |
| J2 | 3.14rad/s (180°/s) | 2.53rad/s (145°/s) | ||
| J3 | 3.32rad/s (190°/s) | 3.14rad/s (180°/s) | 2.88rad/s (165°/s) | |
| J4 | 5.32rad/s (305°/s) | 4.45rad/s (255°/s) | 4.10rad/s (235°/s) | |
| J5 | 5.32rad/s (305°/s) | 4.45rad/s (255°/s) | 4.10rad/s (235°/s) | |
| J6 | 7.33rad/s (420°/s) | 6.46rad/s (370°/s) | 6.11rad/s (350°/s) | |
| Payload | Wrist | 35kg | 50kg | 70kg |
| Forearm | 15kg | |||
| Wrist torque | J4 | 160N·m | 210N·m | 300N·m |
| J5 | 160N·m | 210N·m | 300N·m | |
| J6 | 90N·m | 130N·m | 150N·m | |
| Wrist moment of inertia*1 | J4 | 16kg·m2 | 30kg·m2 | |
| J5 | 16kg·m2 | 30kg·m2 | ||
| J6 | 5kg·m2 | 12kg·m2 | ||
| Position repeat accuracy*2 | +/-0.07mm | |||
| Maximum working air pressure | 0.49MPa (5.0kgf/cm2) or less | |||
| Ambient temperature | 0 to 45°C | |||
| Installation parameters | Floor mounted | |||
| Environmental resistance*3 | Body | Meets the IP54 standard (optional IP65/67) | ||
| Wrist | Meets the IP67 standard (for dust and waterproofing) | |||
| Robot mass | 640kg | |||
(*1) Note that wrist moment of inertia varies depending on wrist load conditions.
(*2) JIS B 8432 compliant.
(*3) Fluids that corrode the seal material, such as organic solvents, acids, alkalis, salts, and petroleum-based cutting fl uids, cannot be used
(*1) The specifications are subject to changes without notice.
(*2) In case that an end user uses this product for military purpose or production of weapon, this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Act. Please go through careful investigation and necessary formalities for export.

Max Payload : 400 KG
Max Reach :
1. Hollow wrist structure
- Avoiding interference of cables with peripheral equipment.
- Improved reliability of cables due to its stable behavior with wrist movement.
2. High-speed motion
- Top level performance in its class.
3. Powerful wrist
- Easy handling for large work-pieces due to the large wrist capacity.
- A work-piece of large moment of inertia is also available.
4. Advanced applicability
- Wide envelope.
- 5 meter vertical stroke.
5. Application signals are standard
- 2 ports for air, 40 application signals, DeviceNet cable, LAN cable.
| Robot model | MC400L-01 | |
|---|---|---|
| Structure | Articulated | |
| Number of axes | 6 | |
| Drive system | AC servo system | |
| Max. operating envelope | J1 | ±3.14rad (±180°) |
| J2 | -1.83 | |
| J3 | -2.27 | |
| J4 | ±3.67rad (±210°) | |
| J5 | ±2.09rad(±120°) | |
| J6 | Max. : ±6.28rad (±360°) Initial setting : ±3.67rad (±210°) *4 | |
| Max. velocity | J1 | 1.57rad/s (90°/s) |
| J2 | 1.57rad/s (90°/s) | |
| J3 | 1.57rad/s (90°/s) | |
| J4 | 1.92rad/s (110°/s) | |
| J5 | 1.92rad/s (110°/s) | |
| J6 | 3.14rad/s (180°/s) | |
| Payload | Wrist | 400kg |
| Forearm *1 | Max. 50kg | |
| Allowable static load torque for wrist | J4 | 3450N·m |
| J5 | 3450N·m | |
| J6 | 1725N·m | |
| Allowable moment of inertia for wrist *2 | J4 | 600kg·m2 |
| J5 | 600kg·m2 | |
| J6 | 400kg·m2 | |
| Position repeatability *3 | ±0.3mm | |
| Installation | Floor | |
| Ambient conditions | Ambient temperature : 0 | |
| Robot mass | 3,050kg | |
1[rad] = 180/π[°], 1[N·m] = 1/9.8[kgf·m]
If the cables do not go through the hollow hole of J6, it is possible to widen the operating envelope of J6 up to ±360° considering the condition.
(*1) The specifications are subject to changes without notice.
(*2) In case that an end user uses this product for military purpose or production of weapon, this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Act. Please go through careful investigation and necessary formalities for export.

Max Payload : 350 – 470 KG
Max Reach :
1. Linkage-less construction is simple and compact
- Simple construction has no counterweights or parallel linkage.
- Compact form can be installed in small places.
2. Expansive operating stroke and lifting capabilities
- Plenty of wrist torque (1.7 times our existing model) easily handles large work pieces.
- Long arm type (MC280L) has maximum reach of 3,101 mm
- Super heavy lifting type (MC470P) can lift up to 470 kg (wrist must be directed downward)
3. High-speed motion
- Lower weight and greater rigidity make it the fastest robot in its class.
- Reduce cycle times by up to 15% (compared to our existing model).
| Item | Speci cations | |||||
|---|---|---|---|---|---|---|
| Robot model | MC350-01 | MC280L-01 | MC470P-01 | |||
| Structure | Articulated construction | |||||
| No. of axes | 6 | |||||
| Drive system | AC servo system | |||||
| Max. working envelope |
Arm | J1 | Swivel | ±3.14rad (±180°) | ||
| J2 | Horizontal | -1.75 to +0.70rad (-100° to +40°) | ||||
| J3 | Vertical | -3.14 to +2.27rad (-180° to +130°) |
-2.57 to +2.27rad (-147° to +130°) |
-3.14 to +0.61rad (-180° to +35°) |
||
| Wrist | J4 | Rotation 2 | ±6.28rad (±360°) | ±6.28rad *5 (±360°) |
||
| J5 | Bend | ±2.18rad (±125°) | ±2.18rad *5 (±125°) |
|||
| J6 | Rotation 1 | ±6.28rad (±360°) | ||||
| Max. speed |
Arm | J1 | Swivel | 1.83rad/s (105°/s) | ||
| J2 | Horizontal | 1.66rad/s (95°/s) |
1.83rad/s (105°/s) |
1.66rad/s (95°/s) |
||
| J3 | Vertical | 1.66rad/s (95°/s) | ||||
| Wrist | J4 | Rotation 2 | 1.92rad/s (110°/s) |
2.09rad/s (120°/s) |
1.92rad/s (110°/s) |
|
| J5 | Bend | 1.92rad/s (110°/s) |
2.09rad/s (120°/s) |
1.92rad/s (110°/s) |
||
| J6 | Rotation 1 | 3.14rad/s (180°/s) |
3.49rad/s (200°/s) |
3.14rad/s (180°/s) |
||
| Payload | Wrist | 350kg | 280kg | 470kg | ||
| Forearm *1 | Max. 50kg | Max. 25kg | Max. 30kg | |||
| Allowable static load torque |
J4 | Rotation 2 | 2750N·m | 1921N·m | 2750N·m | |
| J5 | Bend | 2750N·m | 1921N·m | 2750N·m | ||
| J6 | Rotation 1 | 1235N·m | 988N·m | 0N·m | ||
| Max. allowable moment of inertia *2 |
J4 | Rotation 2 | 400kg·m2 | |||
| J5 | Bend | 400kg·m2 | ||||
| J6 | Rotation 1 | 250kg·m2 | ||||
| Max. reach | 2,771mm | 3,101mm | 2,771mm | |||
| Position repeatability *3 | ±0.2mm | |||||
| Ambient temperature | 0 to 45°C | |||||
| Ambient humidity | 20 to 85% RH (without condensation) | |||||
| Vibration | 0.5G or less | |||||
| Installation | Floor mount | |||||
| Weight | 1,620kg | 1,700kg | 1,620kg | |||
1[rad]=180/π[°]
1[N·m]=1/9.8[kgf·m]
(*1) Load speci cation of number 1 arm varies according to wrist load conditions and installation position.
(*2) Note that the allowable moment of inertia of wrist varies with the wrist load conditions.
(*3) JIS B 8432 compliant.
(*4) Permitted height is not higher than 1,000m above sea level. If used in higher place, permitted temperature is affected by height.
(*5) Software limits the downward vertical range of axis 5 to ±5°. Axis 4 can move ±360° and axis 5 can move ±125° only when the encoder correction screen or the software limit settings screen is open.
Exterior dimensions and Operating envelope

Max Payload : 600 KG
Max Reach :
1. Wrist with hollow construction
- Compact and easy routing for cables and hoses.
- Improved reliability for ancillary cables and hoses.
2. Strong wrist
- Supports large-scale guns and workpieces with substantial wrist torques.
- Top of their class wrist torques.
(1.8 times the wrist capacity compared to our conventional machines)
3. High-speed operations
- Top operating performance in their class.
4. Improved applicability
- Large operating envelope to easily replace existing equipment.
5. Signal wires for moving applications are standard equipment
- Air 2 system, signal wires with 40 conductors, DeviceNet cable, LAN cable.
 >
>(*1) The specifications are subject to changes without notice.
(*2) In case that an end user uses this product for military purpose or production of weapon, this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Act. Please go through careful investigation and necessary formalities for export.
| Robot model | MC600-01 | |
|---|---|---|
| Structure | Articulated | |
| Number of axes | 6 | |
| Drive system | AC servo system | |
| Max. operating envelope |
J1 | ±3.14rad (±180°) |
| J2 | -1.83 |
|
| J3 | -2.44 |
|
| J4 | ±3.67rad (±210°) | |
| J5 | ±2.09rad(±120°) | |
| J6 | Maximum : ±6.28rad (±360°) Initial setting : ±3.67rad (±210°) *4 |
|
| Max. velocity | J1 | 1.57rad/s (90°/s) |
| J2 | 1.57rad/s (90°/s) | |
| J3 | 1.57rad/s (90°/s) | |
| J4 | 1.92rad/s (110°/s) | |
| J5 | 1.92rad/s (110°/s) | |
| J6 | 3.14rad/s (180°/s) | |
| Payload | Wrist | 600kg |
| Forearm *1 | Maximum 50kg | |
| Allowable static load torque for wrist |
J4 | 3450N·m |
| J5 | 3450N·m | |
| J6 | 1725N·m | |
| Allowable moment of inertia for wrist *2 |
J4 | 600kg·m2 |
| J5 | 600kg·m2 | |
| J6 | 400kg·m2 | |
| Position repeatability *3 | ±0.3mm | |
| Installation | Floor | |
| Ambient conditions |
Ambient temperature : 0 |
|
| Robot mass | 2,850kg | |
* Explosion-proof is not available.
(*1) This value changes by placement and load conditions of a wrist.
(*2) The Allowable moment of inertia of a wrist changes with load conditions of a wrist.
(*3) This value conforms to “JIS B 8432”.
(*4) The initial settings are ±210°. When passing cable through the hollow part of the 6th axis, use a range of ±210°. When a cable is not passed through, the operating envelope can be extended to a maximum of ±360°, depending on the usage conditions.
(*5) Permitted height is not higher than 1,000m above sea level. If used in higher place, permitted temperature is affected by height.

")






