

A clean room applicable model of the less expensive compact single-axis robot FLIP-X series. Suction air joint is provided as standard accessory and low dust emission grease is used.
As a stainless sheet with excellent durability is attached to the slide table surface, this achieves high cleanliness degree.
Degree of cleanliness : CLASS 3 (ISO14644-1) C4L/C4LH, C5L/C5LH, C6L
Degree of cleanliness : CLASS 10 (FED-STD-209D) Except a left model
*Per 1cf (0.1µm base),when suction blower is used.
- Stroke : 50 to 2050mm
- Intake air : 15 to 90Nℓ/min
- Degree of cleanliness : CLASS10*
- Maximum payload : 120kg(Horizontal)
* ISO14644-1 of equivalent, when a suction blower is used
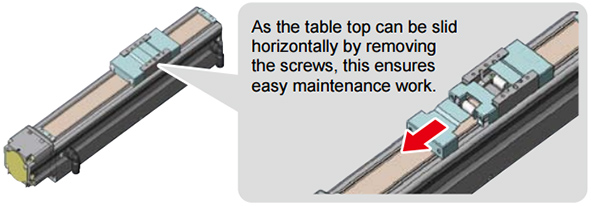
Excellent maintenance ability
For C4L to C6L models, removing the screws from the side panel of the slider will allow replacement of the inner roller without detaching the tool. For C8 to C20 models, even when the direct coupling structure is used, the motor or ball screw can be replaced individually.
| Model | Size (mm) | Lead (mm) | Payload (kg) | Maximum speed (mm/sec) | Stroke (mm) | |
|---|---|---|---|---|---|---|
| Horizontal | Vertical | |||||
C4L C4LH | W45×H53 | 12 | 4.5 | 1.2 | 720 | 50 to 400 |
| 6 | 6 | 2.4 | 360 | |||
| 2 | 6 | 7.2 | 120 | |||
| C4H | W45×H55 | 12 | 4.5 | 1.2 | 720 | 50 to 300 |
| 6 | 6 | 2.4 | 360 | |||
| 2 | 6 | 7.2 | 120 | |||
C5L C5LH | W55×H52 | 20 | 3 | – | 1000 | 50 to 800 |
| 12 | 5 | 1.2 | 800 | |||
| 6 | 9 | 2.4 | 400 | |||
| C5H | W55×H65 | 12 | 5 | 1.2 | 800 | 50 to 600 |
| 6 | 9 | 2.4 | 400 | |||
| C6L | W65×H56 | 20 | 10 | – | 1000 | 50 to 800 |
| 12 | 12 | 4 | 800 | |||
| 6 | 30 | 8 | 400 | |||
| C8 | W80×H75 | 20 | 12 | – | 1000 | 150 to 800 |
| 12 | 20 | 4 | 720 | |||
| 6 | 40 | 8 | 360 | |||
| C8L | W80×H75 | 20 | 20 | 4 | 1000 | 150 to 1050 |
| 10 | 40 | 8 | 600 | |||
| 5 | 50 | 16 | 300 | |||
| C8LH | W80×H75 | 20 | 30 | – | 1000 | 150 to 1050 |
| 10 | 60 | – | 600 | |||
| 5 | 80 | – | 300 | |||
| C10 | W104×H85 | 20 | 20 | 4 | 1000 | 150 to 1050 |
| 10 | 40 | 10 | 500 | |||
| 5 | 60 | 20 | 250 | |||
| C14 | W136×H96 | 20 | 30 | 4 | 1000 | 150 to 1050 |
| 10 | 55 | 10 | 500 | |||
| 5 | 80 | 20 | 250 | |||
| C14H | W136×H96 | 20 | 40 | 8 | 1000 | 150 to 1050 |
| 10 | 80 | 20 | 500 | |||
| 5 | 100 | 30 | 250 | |||
| C17 | W168×H114 | 20 | 80 | 15 | 1000 | 250 to 1250 |
| 10 | 120 | 35 | 500 | |||
| C17L | W168×H114 | 50 | 50 | 10 | 1000 | 1150 to 2050 |
| C20 | W202×H117 | 20 | 120 | 25 | 1000 | 250 to 1250 |
| 10 | – | 45 | 500 | |||
Note. Size is the approximate cross sectional size.

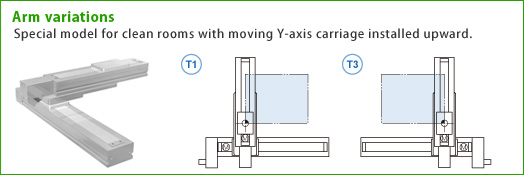
Stainless steel sheet with superb durability is mounted on unit upper surface. Can also be used in perpendicular position.
Degree of cleanliness : CLASS 10
*Per 1cf (0.1µm base),when suction blower is used.
- Intake air : 60 to 90 Nℓ/min.
- Degree of cleanliness : CLASS10Note
- Maximum payload : 20kg
- Maximum speed : 1000 mm/sec.
Note. User tube three Φ 6 air tubes
| Type | Model | Axis | Moving range | Maximun speed (mm/sec) | Maximum payload (kg) |
|---|---|---|---|---|---|
| 2 axes | SXYXC | X | 150 to 1050mm | 1000 | 20 |
| Y | 150 to 650mm | 1000 | |||
| 3 axes | SXYXC(ZSC12) | X | 150 to 1050mm | 1000 | 3 |
| Y | 150 to 650mm | 1000 | |||
| Z | 150mm | 1000 | |||
SXYXC(ZSC6) | X | 150 to 1050mm | 1000 | 5 | |
| Y | 150 to 650mm | 1000 | |||
| Z | 150mm | 500 | |||
| 4 axes | SXYXC(ZRSC12) | X | 150 to 1050mm | 1000 | 3 |
| Y | 150 to 650mm | 1000 | |||
| Z | 150mm | 1000 | |||
| R | 360° | 1020°/sec | |||
SXYXC(ZRSC6) | X | 150 to 1050mm | 1000 | 5 | |
| Y | 150 to 650mm | 1000 | |||
| Z | 150mm | 500 | |||
| R | 360° | 1020°/sec |

A clean room applicable model of the SCARA robot.
The Z-axis spline is covered by bellows made of less dust emission materials and other sliding parts are completely sealed.
Harnesses are also completely built-in and the inside of the robot is sucked from the rear of the base to prevent dust emission.
Degree of cleanliness : Class 10 (0.1μm) equivalent to FED-STD-209D (CLASS ISO3 ISO14644-1)
*Per 1cf (0.1µm base),when suction blower is used.
- Arm length : 180 mm to 1000 mm
- Intake air : 30 to 60 Nℓ/min.
- Degree of cleanliness : CLASS ISO3(ISO14644-1) CLASS10(FED-STD-209D)
- Maximum payload : 20kg
1. Vertical bellows structure improves the reliability of the clean performance.
As a belt-less structure is used, no dust generation caused by the belt occurs. Furthermore, as the YK-XGC type was renewed to a structure, in which the bellows are installed on the Z-axis vertically, the reliability of the clean performance was further improved.
Note.Except for YK500XC to YK1000XC

2. High durability
As a belt-less structure is used, the robot can be operated without worry about belt elongation and secular change Note.
Additionally, the bellows installed on the Z-axis use material with high durability to ensure the durability performance.
Note. Except for YK500XC to YK1000XC
3. Completely beltless structure improves the rigidity
A completely beltless structure was achieved using a ZR-axis direct coupling structure. As a speed reducer is coupled to the tip rotation axis, the R-axis tolerable moment of inertia is very high and the high-speed movement is possible even with a heavy workpiece or largely offset workpiece.
Note. Except for YK500XC to YK1000XC
| Model | Type | Arm length (mm) | Maximum payload (kg) | Standard cycle time (sec) |
|---|---|---|---|---|
YK180XC | Tiny type | 180 | 1 | 0.42 |
YK220XC | 220 | 1 | 0.45 | |
YK250XGC | Small type | 250 | 4 | 0.57 |
YK250XCH | 250 | 3 | 0.54 | |
YK350XGC | 350 | 4 | 0.57 | |
YK350XCH | 350 | 3 | 0.54 | |
YK400XGC | 400 | 4 | 0.57 | |
YK400XCH | 400 | 3 | 0.66 | |
YK500XC | Medium type | 500 | 10 | 0.53 |
YK500XGLC | 500 | 4 | 0.74 | |
YK600XC | 600 | 10 | 0.56 | |
YK600XGLC | 600 | 4 | 0.74 | |
YK700XC | 700 | 20 | 0.57 | |
YK800XC | 800 | 20 | 0.57 | |
YK1000XC | 1000 | 20 | 0.60 |

")






