
Improve takt time
Lower running cost
Long Service life
Shorter start-up time
Reduced transport line space
Increased throughput
Flexible line configurations
Excellent maintainability
1. Two-second reduction in takt time
Reduced transfer time
High-speed and high-accuracy transfer
Max. speed: 3000 mm/sec.
Max. acceleration: 2G
Max. load mass: 15 kg
Repeated positioning accuracy: +/−0.015 mm (standalone slider) Note
Note. This is the repeated positioning accuracy for a standalone slider when positioning from one direction (single-side approach).
Note. The positioning accuracy for the single-side approach after correction by RFID is 0.1 mm including the mutual difference between sliders.
2. Modular production allows highly flexible line structure
Save equipment space
Can be moved efficiently between processes with different takts
Workpieces do not need to be retracted
Significant reduction of start-up time
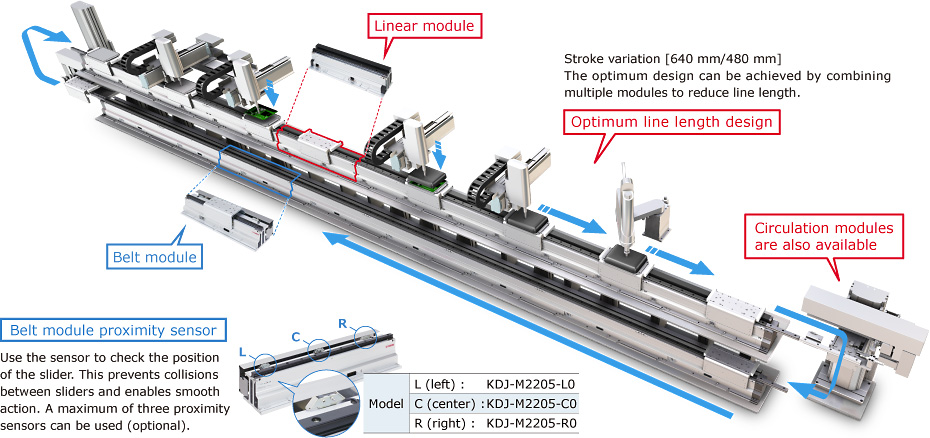
Construct branching lines, joint lines, and other lines in flexible configuration
3. Additional modules provide expandability.
Flexible set-up of the slider’s acceleration/deceleration, forward/backward movement, positioning, and other actions. The variety of possible line structures has been greatly expanded to supersede conventional models.
Belt modules can be selected
Easier to design and implement
4. Excellent maintainability
Optimal for small batch production of various product types
Quick recovery by replacing the slider when machine trouble occurs
Easy maintenance
1. Linear Conveyor Module
| Drive method | Moving magnet type, Linear motor with flat core |
|---|---|
| Repeat positioning accuracy | +/−0.015 mm (single slider) Note1/ width 0.1 mm (mutual difference among all sliders) Note2 |
| Scale | Electromagnetic type / resolution 5 μm |
| Max. speed | 3000 mm/sec |
| Max. acceleration | 2 G |
| Max. payload | 15 kg Note3 Note4 |
| Rated thrust | 48 N |
| Total module length | 640 mm (4M) / 480 mm (3M) / 400 mm (for 2MT circulation) |
| Max. number of combined modules | 16 (total length: 10240 mm) |
| Max. number of sliders | 16 (when 16 modules are combined) |
| Min. pitch between sliders | 420 mm |
| Mutual height difference between sliders | 0.08 mm |
| Max. external size of body cross-section | W 136.5 mm × H 155 mm (including slider) |
| Bearing method | 1 guide rail / 2 blocks (with retainer) |
| Module weight | 12.5 kg (4M) / 9.4 kg (3M) / 7.6 kg (2MT) |
| Slider weight | 2.4 kg / 3.4 kg (when the belt module is used.) |
| Cable length | 3 m / 5 m |
| Controller | LCC140 |
Note1. Repeated positioning accuracy when positioning in the same direction (pulsating)
Note2. Positioning accuracy in the pulsating when using the position correction function with the RFID.
Note3. Weight per single slider.
Note4. When used together with the belt module, the max. payload becomes 14 kg since the parts dedicated to the belt are attached to the slider.
2. Belt Module
| Drive method | Belt back surface pressing force drive |
|---|---|
| Bearing method | 1 guide rail / 2 blocks (with retainer) |
| Max. speed | 560 mm/sec |
| Max. payload | 14 kg |
| Module length | 640 mm (4B) / 480 mm (3B) |
| Max. number of sliders | 1 slider / 1 module |
| Main unit maximum cross-section outside dimensions | W 173.8 mm × H 155 mm (including slider) |
| Cable length | None |
| Controller | Dedicated driver (Included) |
| Power supply | DC 24 V 5A |
| Communication I/F | Dedicated input/output 16 points |
| Module weight | 11.2 kg (4B) / 8.8 kg (3B) |
3. LCC140 (controller for LCM100)
| Controllable robot | Linear conveyor module LCM series |
|---|---|
| Outside dimensions | W402.5×H229×D106.5mm |
| Main body weight | 4.8 kg |
| Input power voltage | Single-phase AC200 to 230V +/−10% or less (50/60Hz) |
| Maximum power consumption | 350VA (LCM100-4M 1 slider is driven.) |
| External input/output | SAFETY |
| RS-232C (dedicated to RFID) | |
| RS-232C (for HPB / doubles as POPCOM+) | |
| Network option | CC-Link Ver. 1.10 compatible, Remote device station (2 stations) |
| DeviceNet™ Slave 1 node | |
| EtherNet/IP™ adapter 2 ports | |
| Programming box | HPB, HPB-D (Software version 24.01 or later) |

")






