
Basic Info
Max Payload : 20 KG*
1. 7-axes structure
- Flexible and complex positioning and motion can be available by 7-axes structure.
2. Compact body, powerful arm
- Minimizing installation space.
- Payload 20kg MAX 30kg
(Limited envelope within 30kg)
3. Controller
- FD11
Specification
| Robot model | MR20-02 | MR20L-01 | |
|---|---|---|---|
| Construction | Articulated construction | ||
| Number of axes | 7 | ||
| Drive system | AC servo system | ||
| Max. operating area | JT1 | +/-3.14rad (+/-180°) | |
| JT2 | +0.96 to -2.09rad (+55 to -120°) | ||
| JT7 | +/-3.14rad (+/-180°) | ||
| JT3 | +2.35 to -2.89rad (+135 to -166°) | ||
| JT4 | +/-3.14rad (+/-180°) | ||
| JT5 | +/-2.35rad (+/-135°) | +/-2.42rad (+/-139°) | |
| JT6 | +/-6.28rad (+/-360°) | ||
| Max. speed | JT1 | 2.96rad/s (170°/s) | |
| JT2 | 2.96rad/s (170°/s) | ||
| JT7 | 2.96rad/s (170°/s) | ||
| JT3 | 2.96rad/s (170°/s) | ||
| JT4 | 4.36rad/s (250°/s) | 6.28rad/s (360°/s) | |
| JT5 | 4.36rad/s (250°/s) | 6.28rad/s (360°/s) | |
| JT6 | 5.23rad/s (300°/s) | 10.5rad/s (600°/s) | |
| Payload | 20kg*1 | 20kg | |
| Wrist torque | JT4 | 80.8N·m | 49N·m |
| JT5 | 80.8N·m | 49N·m | |
| JT6 | 44.1N·m | 23.5N·m | |
| W rist moment of inertia*2 | JT4 | 6.0kg·m2 | 1.6kg·m2 |
| JT5 | 6.0kg·m2 | 1.6kg·m2 | |
| JT6 | 2.3kg·m2 | 0.8kg·m2 | |
| Position repeat accuracy | +/-0.06mm | ||
| Maximum working air pressure | 0.49MPa (5.0kgf/cm2) or less | ||
| Ambient temperature | 0 to 45°C | ||
| Installation parameters | Floor mounted/ceiling mounted | ||
| Environmental resistance*3 | Meets the IP65 standard (for dust and waterproofing) | ||
| Robot mass | 230kg | ||
1[rad]=180/π[°] 1[N·m]=1/9.8[kgf·m]
To mount a load to the robot arm, it must be loaded either to the forearm or to the upper part of the J3 axis.
(*1) Max payload 30kg (limited envelope)
Dimension
Operating envelope
 Figures in ( ) indicate the range of operations for the MR20L-01.
Figures in ( ) indicate the range of operations for the MR20L-01.
(*1) The specifications are subject to changes without notice.
(*2) In case that an end user uses this product for military purpose or production of weapon, this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Law. Please go through careful investigation and necessary formalities for export.
Figures in ( ) indicate the range of operations for the MR20L-01.
(*1) The specifications are subject to changes without notice.
(*2) In case that an end user uses this product for military purpose or production of weapon, this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Law. Please go through careful investigation and necessary formalities for export.

Basic Info
Max Payload : 35 – 50 KG
1. 7-axes structure
- Automation with robot can be possible without enough space.
2. Harsh production environment
- The new MR (35/50kg) has a std.IP67.
- Available IP ratings make the MR Series ideal for various applications that include harsh environments that previously required expensive robot covers.
3. Controller
- FD11
When using conventional robots
Robot installed in front of the machine
Example loading system using the MR50
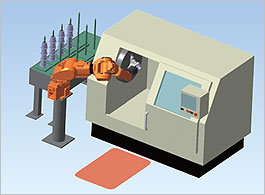
We’ve provided space in front of the machine for easier maintenance!
Specification
| Robot model | MR35-01 | MR50-01 | |
|---|---|---|---|
| Construction | Articulated construction | ||
| Number of axes | 7 | ||
| Drive system | AC servo system | ||
| Max. operating area | J1 | +/-2.88rad (+/-165°) | |
| J2 | +2.53 to -0.52rad (+145 to -30°) | ||
| J3 | +2.44 to -2.55rad (+140 to -146°) | ||
| J4 | +/-6.28rad (+/-360°) | ||
| J5 | +/-2.18rad (+/-125°) | ||
| J6 | +/-7.84rad (+/-450°) | ||
| J7 | +/-3.32rad (+/-190°) | ||
| Max. speed | J1 | 3.14rad/s (180°/s) | 3.05rad/s (175°/s) |
| J2 | 3.05rad/s (175°/s) | 2.44rad/s (140°/s) | |
| J3 | 3.14rad/s (180°/s) | 2.88rad/s (165°/s) | |
| J4 | 5.32rad/s (305°/s) | 4.45rad/s (255°/s) | |
| J5 | 5.32rad/s (305°/s) | 4.45rad/s (255°/s) | |
| J6 | 7.33rad/s (420°/s) | 6.46rad/s (370°/s) | |
| J7 | 2.27rad/s (130°/s) | ||
| Payload | Wrist | 35kg | 50kg |
| Forearm | 15kg | ||
| Allowable static load torque for wrist |
J4 | 160N·m | 210N·m |
| J5 | 160N·m | 210N·m | |
| J6 | 90N·m | 130N·m | |
| Allowable moment of inertia for wrist*1 |
J4 | 16kg·m2 | 30kg·m2 |
| J5 | 16kg·m2 | 30kg·m2 | |
| J6 | 5kg·m2 | 12kg·m2 | |
| Position repeat accuracy*2 | +/-0.07mm | ||
| Maximum working air pressure | 0.49MPa (5.0kgf/cm2) or less | ||
| Ambient temperature | 0 to 45°C | ||
| Installation parameters | Floor mounted | ||
| Environmental resistance*3 |
Body | Meets the IP67 standard (for dust and waterproofing) |
|
| Wrist | Meets the IP67 standard (for dust and waterproofing) |
||
| Robot mass | 745kg | ||
(*2) Inverted, wall, and inclined installations are options.
(*3) Fluids that corrode the seal material, such as organic solvents, acids, alkalis, salts, and petroleum-based cutting fluids, cannot be used.
Dimension
Operating envelope
(*1) The specifications are subject to changes without notice.
(*2) In case that an end user uses this product for military purpose or production of weapon, this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Act. Please go through careful investigation and necessary formalities for export.
(*1) The specifications are subject to changes without notice.
(*2) In case that an end user uses this product for military purpose or production of weapon, this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Act. Please go through careful investigation and necessary formalities for export.

")






