
Max. Payload : 1.o KG
Max. Reach : 350 mm
1. Great for High Density Layout
- Maximized factory floor space efficiency
2. Apply to various application
- Large torques, helps your automation with high flexibility
| Robot type | MZ01-01 | |
|---|---|---|
| Structure | Articulated | |
| Number of axis | 6 | |
| Drive system | AC servo motor | |
| Max. working envelope |
J1 | ±2.97rad (±170°) |
| J2 | -1.57 to 1.48rad (-90 to 85°) | |
| J3 | -0.87 to 1.57rad (-50 to 90°) | |
| J4 | ±2.53rad (±145°) | |
| J5 | ±2.18rad (±125°) | |
| J6 | ±6.28rad (±360°) | |
| Max. speed*1 | J1 | 5.59rad/s (320°/s) |
| J2 | 5.59rad/s (320°/s) | |
| J3 | 6.54rad/s (375°/s) | |
| J4 | 10.47rad/s (600°/s) | |
| J5 | 10.47rad/s (600°/s) | |
| J6 | 10.47rad/s (600°/s) | |
| Max. payload*2 | Wrist | 1.0kg rated |
| Arm 1 | max. 0.25kg | |
| Allowable static load torque |
J4 | 0.9N·m |
| J5 | 0.9N·m | |
| J6 | 0.78N·m | |
| Allowable moment of inertia*3 |
J4 | 0.008kg·m2 |
| J5 | 0.008kg·m2 | |
| J6 | 0.006kg·m2 | |
| Position repeatability*4 | ±0.02mm | |
| Max. reach | 350mm | |
| Air piping | IN : Ø6×2, OUT : Ø4×2 | |
| Application signal line | 12 wires | |
| Installation | Floor/Inverted | |
| Ambient conditions | Temperature : 0 to 40C°*5 Humidity : 20 to 85%RH (No dew condensation) Vibration to the installation face : 0.5G (4.9m/s2) or less |
|
| Dust-proof Drip-proof performance*6 |
Robot only IP40 equivalent | |
| Cleanliness*7 | ISO 14644-1 CLASS5 (Equivalent) | |
| Noise level*8 | 70dB | |
| Robot mass | 10kg | |
*1 The “Max. speed” in this table is the available maximum value and will change depending on the work-program and the wrist load condition.
*2 When no load is on arm 1 (arm of axis 3), the max. wrist load is 1.0kg. However, when a 0.25kg load is on arm 1, the wrist load can only go up to 0.75kg.
*3 The allowable moment of inertia of wrist changes with load conditions.
*4 Based on JIS B8432
*5 Permitted installation is less than 1,000m above sea level.
Allowable operating temperature dependent on installation height.
*6 Limit use in applications where liquids, such as, organic compound, acidity, alkalinity, chlorine, gasoline and/or cutting fluids. These could deteriorate seal material. Wire harness is IP65 equivalent, controller is IP20 equivalent.
*7 To ensure a cleanliness, install the robot in a down-flow type cleanroom. The robot’s packaging is not dust proof. Before bringing the robot into a cleanroom, you must clean the robot by wiping it off or by removing dust and fine particles from it.
*8 A-weighted equivalent level of sound measured according to JIS Z 8737-1 (ISO 11201), while operating at max. Speed with the rated load.
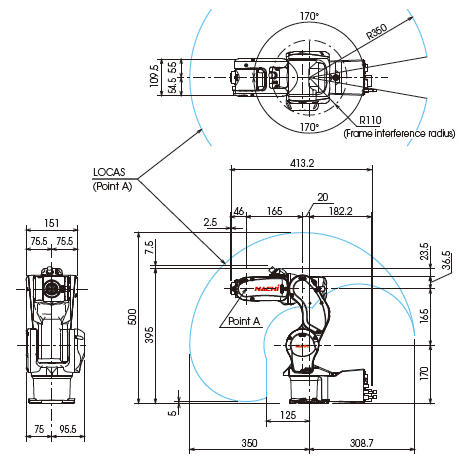
Robot Dimensions and Working Envelope
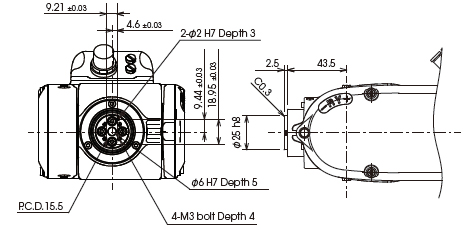
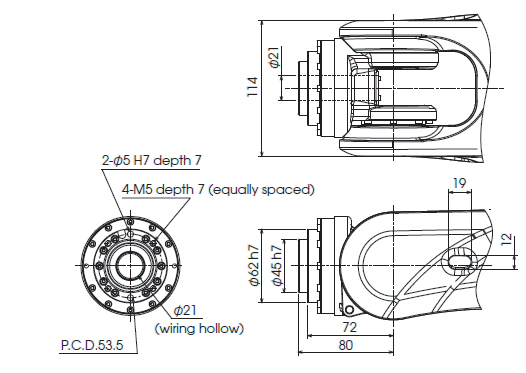
Wrist Dimensions
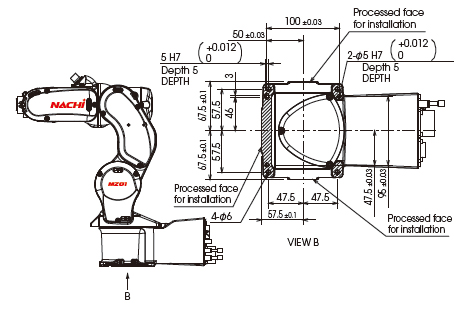
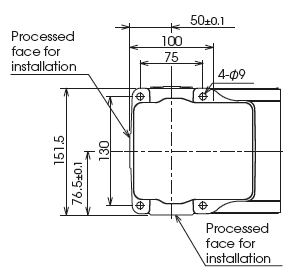
Installation Dimensions

Max. Payload : 4.o KG
Max. Reach : 541mm
1. Smart cable routing in hollow wrist
- Hand cables are neatly housed inside of the hollow wrist. Smart cable routing helps prevent interference with peripheral equipment, which greatly improves equipment reliability.
2. Compact with a wide working envelope
- The lightweight and compact robot arm helps keep the equipment simple and saves space.
- The installation area is half that of the MZ07 (A5 paper size).
3. Fastest operating speed in its class improves productivity
- The lightness of the robot arm and the latest control technologies give it the fastest operation in its class, which improves productivity.
| Robot Model | MZ04-01 (MZ04D-01) | MZ04E-01 *3 (MZ04DE-01) | |||
|---|---|---|---|---|---|
| Number of Axis | 6 | ||||
| Drive System | AC Servo Drive | ||||
| Max. Speed [rad/s(°/s)] | Arm | J1 | Swivel | 8.38 (480) | 3.49 (200) |
| J2 | Forward/Backward | 8.03 (460) | 2.62 (150) | ||
| J3 | Upward/Downward | 9.08 (520) | 3.32 (190) | ||
| Wrist | J4/J5 | Rotation 2/Bend | 9.77 (560) | ||
| J6 | Rotation 1 | 15.71 (900) | |||
| Max. Payload [kg] | 4 | ||||
| Allowable Static Loading Torque | J4/J5 | Rotation 2/Bend | 8.86 | ||
| J6 | Rotation 1 | 4.9 | |||
| Position Repeatability*2 | ±0.02mm | ||||
| Ambient Temperature [°C] | 0 | ||||
| Installation | Floor / Wall / Tilted / Invert mount | Floor / Invert mount | |||
| Robot Mass [kg] | 26 *5 | 25 *5 | |||
| Max. Reach [mm] | 541 | ||||
| Dust Proof, Drip Proof | IP40 equivalent *4 | ||||
l1[rad]=180/π[°] 1[N·m]=1/9.8[kgf·m]
(*2) JIS B 8432 compliant.
(*3) MZ04E/MZ04DE has 80W motor or smaller in all axis.
(*4) MZ04/MZ04E is IP40 equivalent, MZ04D/MZ04DE is IP67 (dust proof, drip proof).
(*5) Wall mount Bottom Connection Type +4Kg.
Bottom Connection Type +6kg.
Specification of controller
| Controlled Axis | 6-Axes |
|---|---|
| Maximum Control Axis | 7-Axes |
| Program Number | 9,999 programs |
| Memory Capacity | 256MB (2,560,000 program steps equivalent) |
| Memory Device | USB Port |
| External Dimension | 369(W) x 490(D) x 173(H) |
| Weight | Approx. 17kg |
| Primary Power Supply | 3-Phase AC200-230V ±10% Single Phase AC200-230V ±10% |
| Consuming Power | 0.4KVA |
| Dust Proof, Drip Proof | IP20 |
| Ambient Temperature | 0 to 40°C |
| Ambient Humidity | 20 to 85% (Non-condensing) |
(*2) In case that an end user uses this product for military purpose or production of weapon, this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Control Law. Please go through careful investigation and necessary formalities for export.

Max. Payload : 3.5 – 7 KG
Max. Reach : 723 – 1102 mm
1. High-speed motions
-
The world’s fastest speed specification contributes to improved productivity.
2. Wiring through a hollow wrist
-
Improves practicality by reducing the risk of interference between the wiring and nearby equipment, and enables easy entry into confined areas.
3. Supports a wide range of applications
-
In addition to the standard specification, visual, additional axis and force sensor specifications are available, satisfying all needs at a production worksite.
4. Controller
-
CFD Controller
| Robot model | MZ07-01 (MZ07P-01) |
MZ07L-01 (MZ07LP-01) |
MZ03EL-01 | |||
|---|---|---|---|---|---|---|
| Construction | Articulated | |||||
| Number of axis | 6(5) | 6 | ||||
| Drive system | AC Servodrive | |||||
| Max. Working Envelope |
Arm | J1 | Swivel | ±2.97rad (±170°) | ||
| J2 | Forward/ Backward |
-2.36 to +1.40rad (-135°to +80°) | ||||
| J3 | Upward/ Downward |
-2.37 to +4.71rad (-136° to -270°) |
-2.43 to +4.71rad (-139° to -270°) |
-2.71 to +4.71rad (-155° to -270°) |
||
| Wrist | J4*3 | Rotation2 | ±3.32rad (±190°) | |||
| J5 | Bend | ±2.09rad (±120°) | ||||
| J6 | Rotation1 | ±6.28rad (±360°) | ||||
| Max. Speed |
Arm | J1 | Swivel | 7.85rad/s (450°/s) | 5.24rad/s (300°/s) | |
| J2 | Forward/ Backward |
6.63rad/s (380°/s) | 4.89rad/s (280°/s) | 4.01rad/s (230°/s) | ||
| J3 | Upward/ Downward |
9.08rad/s (520°/s) | 6.28rad/s (360°/s) | |||
| Wrist | J4*3 | Rotation2 | 9.60rad/s (550°/s) | |||
| J5 | Bend | 9.60rad/s (550°/s) | ||||
| J6 | Rotation1 | 17.5rad/s (1000°/s) | ||||
| Max. Payload | Wrist | 7kg | 3.5kg | |||
| Allowable Static Loading Torque |
J4*3 | Rotation2 | 16.6N·m | 6.0N·m | ||
| J5 | Bend | 16.6N·m | 6.0N·m | |||
| J6 | Rotation1 | 9.4N·m | 2.9N·m | |||
| Max. Allowable Moment of Inertia*1 |
J4*3 | Rotation2 | 0.47kg·m2 | 0.12kg·m2 | ||
| J5 | Bend | 0.47kg·m2 | 0.12kg·m2 | |||
| J6 | Rotation1 | 0.15kg·m2 | 0.03kg·m2 | |||
| Position Repeatability*2 | ±0.02mm | ±0.03mm | ||||
| Ambient Conditions | 0 to 45°C | |||||
| Installation | Floor / Wall / Tilted / Inverted mount | |||||
| Robot Mass | 36kg *5 | 38kg *5 | 39kg | |||
| Max. Reach | 723mm | 912mm | 1102mm | |||
| Dust Proof, Drip Proof | IP67 | |||||
(*2) JIS B 8432 compliant.
(*3) MZ07P-01 and MZ07LP-01 don’t have J4 axis.
(*4) The “Max. speed” in this table is the available maximum value and will change depending on the workprogram and the wrist load condition.
(*5) Wall mount Bottom Connection Type +6kg.
Bottom Connection Type +8kg..
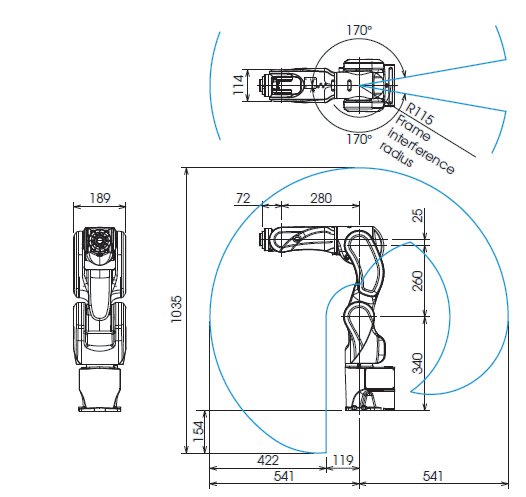
MZ07/07L Robot dimensions and Working envelope
 Service Taps
Service Taps
(*2) In case that an end user uses this product for military purpose or production of weapon, this product may be liable for the subject of export restriction stipulated in the Foreign Exchange and Foreign Trade Law. Please go through careful investigation and necessary formalities for export.
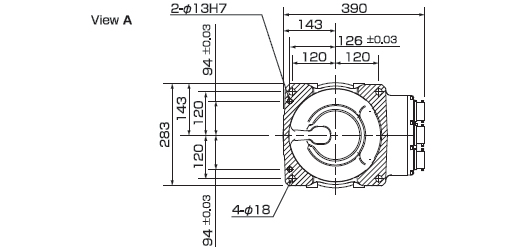
MZ03EL Robot dimensions and Working envelope
Wrist dimensions
Robot base dimensions

Max. Payload : 12.o KG
Max. Reach : 1454 mm
- Protection level: IP67 rated Paint is coolant resistant
- Leads its class in speed in precision
- Footprint is 17% smaller than conventional robots
- Through-arm cabling and air piping included
| Model | MZ12-01 | |
|---|---|---|
| Structure | Articulated | |
| Controllable Axes | 6 | |
| Drive System | AC Servodrive | |
| Max.Working Envelope | J1 | ±2.97rad (±170°) |
| J2 | +1.57 to -2.79rad (+90 to -160°) | |
| J3 | +3.67 to -2.57rad (+210 to -147°) | |
| J4 | ±3.32rad (±190°) | |
| J5 | ±2.44rad (±140°) | |
| J6 | ±6.28rad (±360°) | |
| Max. Speed*1 | J1 | 4.54rad/s (260°/s) |
| J2 | 4.01rad/s (230°/s) | |
| J3 | 4.54rad/s (260°/s) | |
| J4 | 8.20rad/s (470°/s) | |
| J5 | 8.20rad/s (470°/s) | |
| J6 | 12.22rad/s (700°/s) | |
| Payload | Wrist | 12kg |
| Allowable Static Loading Torque | J4 | 25N·m |
| J5 | 25N·m | |
| J6 | 9.8N·m | |
| Max. Allowable Moment of Inertia*2 | J4 | 0.7kg·m2 |
| J5 | 0.7kg·m2 | |
| J6 | 0.2kg·m2 | |
| Position Repeatability *3 | ±0.04mm | |
| Max. Reach | 1454mm | |
| Air Piping | Ø6×2, Ø8×1 | |
| Application Wirings | 24wires (including wires for the optional solenoid valves) | |
| Installation | Floor / Inverted mount / Tilted | |
| Ambient Conditions | Ambient temperature : 0 to 45C°*4 Ambient humidity : 20 to 85%RH (without condensation) Vibration : Not more than 0.5G (4.9m/s2) | |
| Environmental Conditions*5 | IP67 equivalent (Protection Rating) | |
| Weight | 150kg | |
(*1) 1[rad]=180/π[°] 1[N·m]=1/9.8[kgf·m]
* Explosion-proof version is not available.
*1 The maximum speed in the chart is a maximum value. The maximum value may change depending on work programs and load conditions of the wrist.
*2 The Allowable Moment of Inertia of a wrist changes with load conditions of a wrist.
*3 JIS B 8432 compliant.
*4 Using at 1000 m or lower sea level. Ambient temperature has limitations when allowable altitude is exceeded.
*5 Fluids that cause the deterioration of sealants, such as gasoline-based cutting fluids, chlorine, alkali, acids, and organic solvents, cannot be used. The wire-harness portion is IP65 equivalent, and the robot controller is IP20 equivalent.
Robot Dimensions and Working Envelope
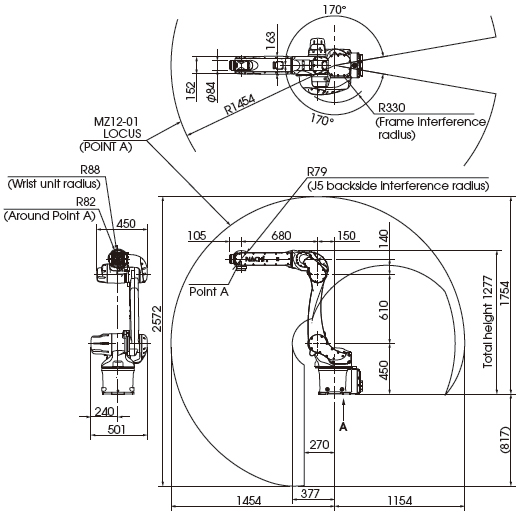
Wrist dimensions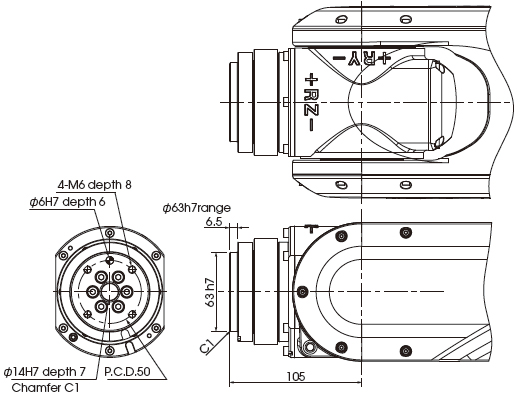

")






